2월26일 화성 탐사선에서 보내 온 남극모자지형(South Polar Cap Terrain)

[이모작뉴스 김남기 기자] 화성의 남극의 지형은 마치 세포의 모습을 닮아 있다. 계곡이 서로 연결되고, 매끄러운 언덕으로 구성되어 화성의 남극모자지형 RSPC(Residual South Polar Cap)로 알려져 있다.
RSPC는 수 킬로미터 두께의 이산화탄소(드라이아이스)의 퇴적물이며 훨씬 더 큰 수빙 위에 놓여 있다. 암석은 길이가 몇 킬로미터이고 구덩이는 직경이 최대 수백 미터에 이른다. 암석을 둘러싼 어두운 지역은 노출 된 물의 얼음으로 추정된다.
# 4 지구로 화성샘플 반환의 첫걸음
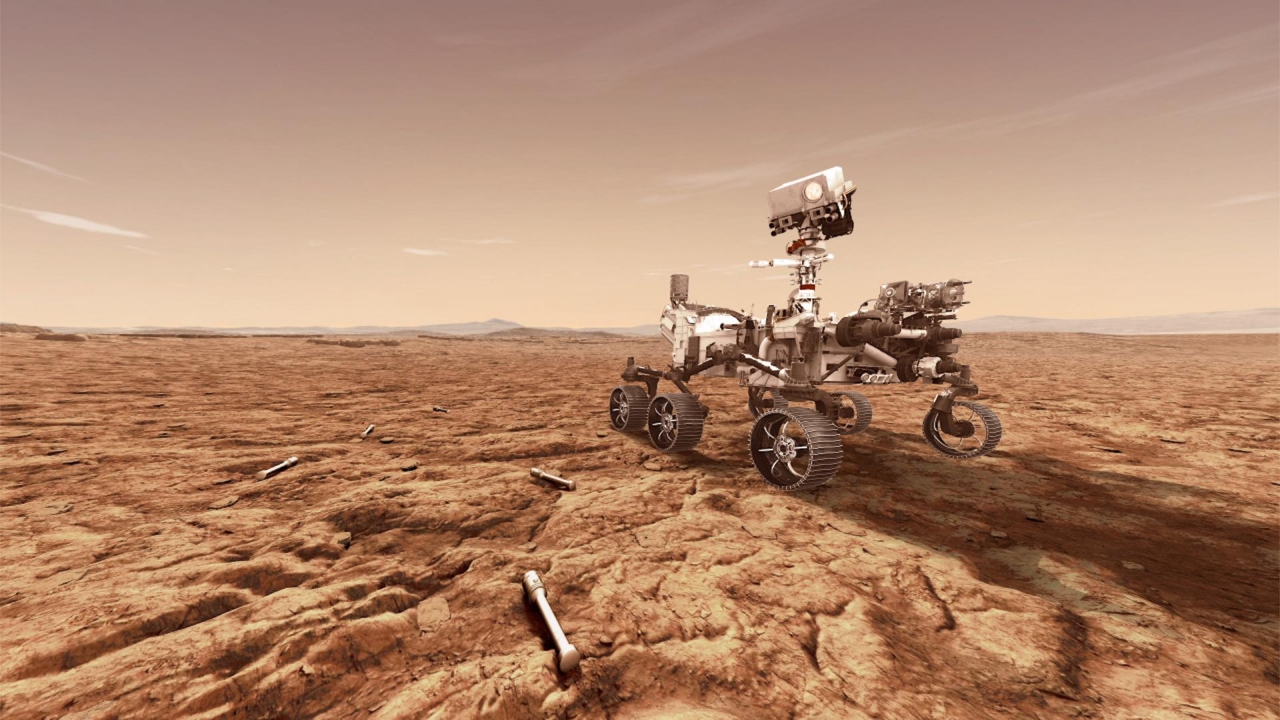
퍼서비어런스 로버는 위 그림에서 볼 수 있듯이 향후 샘플을 지구로 가져올 수 있도록 화성표면에 밀봉 된 튜브에 암석 및 토양 샘플을 저장할 수 있는 샘플 캐싱 시스템을 화성에 가져온 최초의 탐사선이다.
퍼서비어런스 로보의 드릴은 분필 크기 정도의 암석 코어를 절단해 로버가 적절한 드롭에 도달 할 때까지 보관할 샘플 튜브에 넣는다. 탐사선은 또한 NASA와 ESA(유럽 우주국)의 화성 샘플 반환 계획에 의해 착륙선에 샘플을 전달할 수 있다.
샘플이 지구에 도착하면 화성에 보내기에는 너무 크고 복잡한 도구를 사용해 샘플을 더 정확하게 검사 할 수 있으며, 탐사선이 할 수 있는 것보다 훨씬 더 많은 정보를 제공 할 수 있다.
#5 화성의 모습을 실감나게 구현하라!
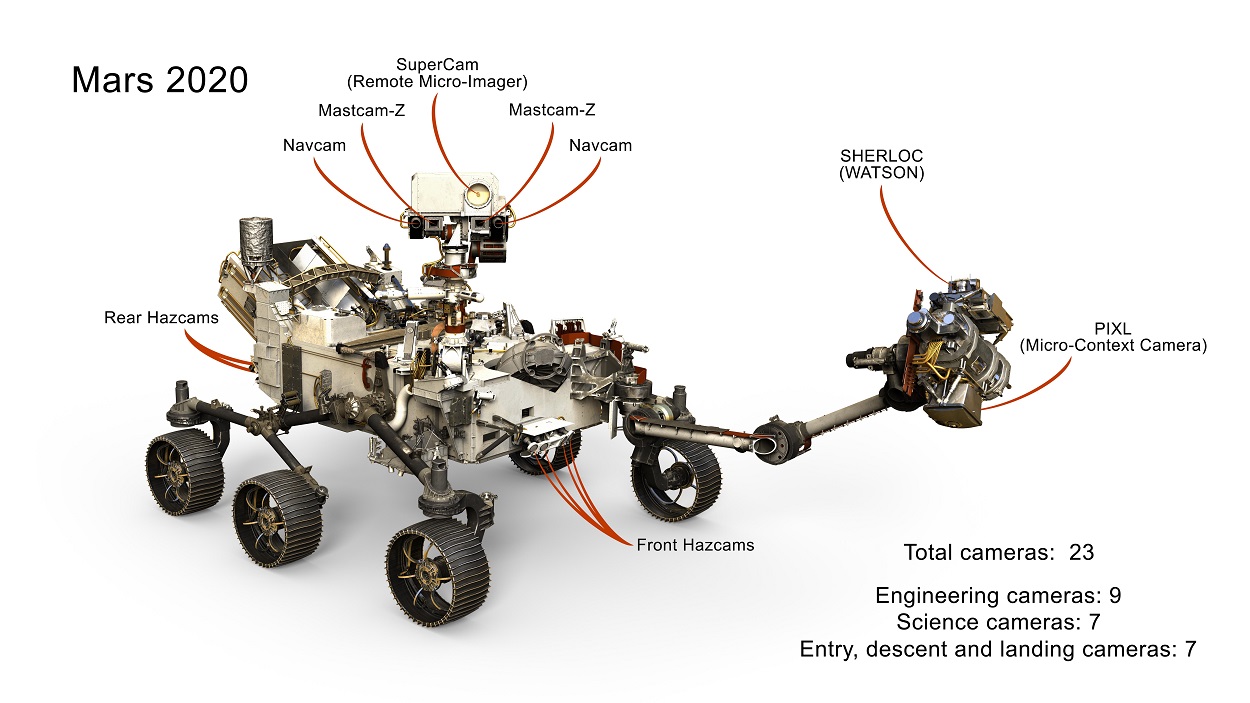
NASA의 2020 화성 임무는 이전의 어떤 탐사선보다 더 많은 ‘눈’을 갖는 것이다. 총 23개는 전반적인 파노라마를 만들고, 장애물을 드러내고, 대기를 연구하고, 과학기기를 지원하는 것이다. 탐사선이 화성으로 하강하는 동안 극적인 전망을 제공하고 낙하산이 다른 행성에서 열릴 때 가장 먼저 이미지를 캡처한다.
퍼서비어런스 로보에 19개의 카메라를 장착하고, 진입, 하강, 착륙과 관련된 우주선에 4개의 카메라를 설치했다. 화성에 착륙하는 장면을 실감나게 고화질로 경험하고, 로버 측면에 부착 된 마이크를 통해 처음으로 착륙 소리를 들을 수 있다.

탐사선에서 퍼서비어런스 로보가 착륙하는 현장 영상
# 6 안전하고 정확하게 화성에 착륙하라! Terrain-Relative Navigation
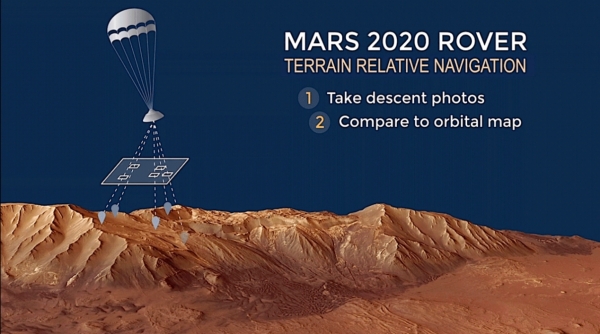
우주선 착륙 시스템인 Terrain-Relative Navigation은 퍼서비어런스 로버가 정확한 착륙지점에서 활동할 수 있게끔 한다. 하강하는 우주선이 화성 표면 위의 위치를 빠르고 자율적으로 파악하고 궤적을 수정할 수 있다. 이 기술은 달에 착륙하는 로봇과 승무원의 안전과 활동에 큰 도움이 된다.
우주선이 화성 대기를 통해 하강하기 시작하면 우주선은 다소 밀도가 높은 공기와 마주 치게 돼 경로를 벗어날 수 있다. 이를 보완하기 위해 백쉘에 작은 추진기를 발사해 리프트 각도와 방향을 조정한다.
그 시점에서 초음속 낙하산을 배치해 Range Trigger를 사용해 착륙 목표까지의 거리를 계산하고 목표를 맞추기에 이상적인 시간에 낙하산을 펼친다. Terrain-Relative Navigation이 특수 카메라를 사용해 정확히 어디로 향하고 있는지 파악하고, 가장 안전한 지점을 선택한다.

우주선 착륙 시스템인 Terrain-Relative Navigation은 퍼서비어런스 로버가 정확한 착륙지점에서 활동할 수 있게 한다. 하강하는 우주선이 화성 표면 위의 위치를 빠르고 자율적으로 파악하고 궤적을 수정할 수 있다. 이 기술은 달에 착륙하는 로봇과 승무원의 안전과 활동에 큰 도움이 된다.
우주선이 화성 대기를 통해 하강하기 시작하면 우주선은 다소 밀도가 높은 공기와 마주 치게 돼 경로를 벗어날 수 있다. 이를 보완하기 위해 백쉘에 작은 추진기를 발사해 리프트 각도와 방향을 조정한다.
그 시점에서 초음속 낙하산을 배치해 Range Trigger를 사용해 착륙 목표까지의 거리를 계산하고 목표를 맞추기에 이상적인 시간에 낙하산을 펼친다. Terrain-Relative Navigation이 특수 카메라를 사용해 정확히 어디로 향하고 있는지 파악하고, 가장 안전한 지점을 선택한다.
하강 단계가 수평을 이루고 시속 1.7 마일 (시속 2.7km)의 최종 하강 속도로 느려지면 "스카이 크레인"기동이 시작돼, 착륙하기 약 12 초 전, 수면에서 약 20미터에서 케이블 세트에서 로버를 내립니다. 한편 로버는 이동성 시스템을 풀고 다리와 바퀴를 착지 위치에 고정시킨다.